

Mikrorobotlar Kara Deliklerde Gezinmeyi Öğreniyor
Pennsylvania Üniversitesi fizikçileri, genel görelilik kuramından algoritmalar kullanarak mikroskobik robotlar için bir navigasyon sistemi geliştirdiler. Einstein’ın algoritmalarıyla kontrol edilen mikro makineler, labirentte otonom olarak yollarını buluyor.
Kara deliğin yakınındaki bir uzay gemisi, eğri uzay-zamandaki en kısa yollar olan jeodezikler boyunca hareket eder. Büyük kütleli kara delik, uzayın kendisini deforme ederek bir “huni” oluşturur. Gemi, dört boyutlu uzay-zamanda düz bir çizgi izler, ancak bir gözlemciye göre, kütleçekimsel nesnenin etrafından dolanarak eğri bir yörüngede hareket ediyormuş gibi görünür. Bu, klasik anlamda bir kütleçekim değil, eğri uzayın geometrisi boyunca gerçekleşen bir harekettir.
Bilim insanları, ilaç dağıtımı ve toksik kirliliğin temizlenmesi için mikroskobik robot orduları yaratmaya yaklaşıyor. Ancak, bir kum tanesi büyüklüğünde robotlar yaratmak, araç içi navigasyon sistemlerinin en aza indirilmesini gerektiriyor.
Araştırmacılar, beklenmedik bir kaynaktan ilham alarak, küçük bir robotun herhangi bir iletişim veya elektronik hesaplama olmadan hareket etmesine yardımcı olacak bir yol buldular: Albert Einstein’ın genel görelilik teorisi. Yerçekimi matematiğini kullanan bilim insanları, tıpkı bir kara deliğin yakınındaki eğri uzayda uçan bir uzay gemisi gibi, robotu yönlendiren ışık desenleri oluşturdular. Çalışma, PNAS dergisinde yayınlandı .
Einstein tarafından kontrol edilen robotlar
Çalışmanın lideri Mark Miskin, küçük bir silikon parçası olan bir mikrorobotun manipüle edilmesinin genellikle yukarıdan aşağıya bir süreç olduğunu, yani “kukla gibi davranması” gerektiğini açıklıyor . Araştırmacılar, mikrorobotları takip ediyor ve manyetik alanlar veya diğer kuvvetler kullanarak hedeflerini dürtüyor.
Fizikçiler, yalnızca ışığa tepki veren, bir milimetreden daha kısa, minimalist bir yüzen robot geliştirdiler. H şeklindeki robot, elektrotlara bağlı mikroskobik güneş hücreleri içeriyor. Hücrelerin aydınlatılması, elektrotlar arasında bir elektrik alanı oluşturuyor ve bu alan, iyonik bir çözeltiye daldırıldığında robotu ters yönde iten bir kuvvet oluşturuyor.
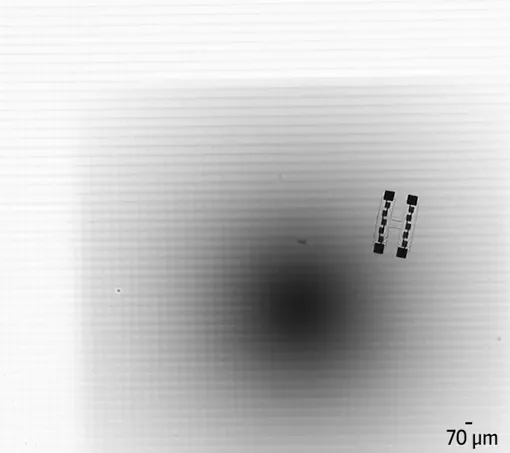
Fizikçiler, özel ışık düzenleri kullanarak “yapay bir uzay-zaman” yarattılar. Işığı, robotların yüzdüğü bir Petri kabına odaklamak için dijital bir projektör ve mercekler kullandılar. Genel görelilik matematiği, labirentin robotların hedeflerine “düz çizgiler” (jeodezik) izleyerek ulaşabilecekleri sanal bir alana dönüşmesine yardımcı oldu.
En karanlık bölge, uzaydaki bir kara delik gibi, hedefte bulunur. Robot, ışık yoğunluğuna tepki verir: Güneş hücreleri, aydınlatmaya bağlı olarak değişen güçte elektrik alanları üretir. Bu, robotu fiziksel uzayda kavisli bir yol boyunca yönlendiren bir kuvvet gradyanı yaratır; ancak matematiksel olarak, dönüşmüş uzay-zamanda düz bir çizgide hareket eder.
Miskin, “Robotu ortama koyup öylece bırakıyorsunuz,” diyor. Robot daha sonra genel görelilik kuramının öngördüğü yolu, öngörülen sürede takip ediyor. Bu süreç, robotlar için harita kodlamanın benzersiz bir yolunu temsil ediyor ve diğer görevler için bellekte yer açıyor.
Derleyen: Feyza ÇETİNKOL
Kaynak: Mikrorobotlar Kara Deliklerde Gezinmeyi Öğreniyor
İç Konuşmayı Kaydeden Cihaz, Düşünceleri Konuşmadan Dikte Etmeye Olanak Tanıyor